Electronic Stability Program
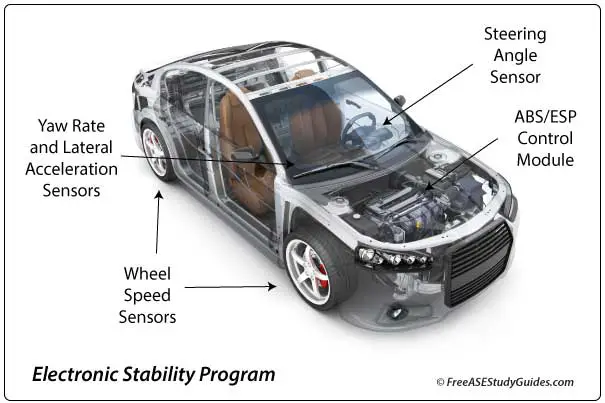
The (ESP) Electronic Stability Program is a vehicle safety program that detects a potential swerve, loss of control, understeer, or oversteer, reduces engine speed, and applies individual brake units to provide or restore vehicle stability and control.
It utilizes the (ABS) Anti-lock braking and (TCS) Traction Control systems. The ESP/ABS control module contains the algorithms and logic that control the system. With ESP, the ABS and TCS systems work together. For example, the ABS prevents wheel skid and a loss of control while braking, and the TCS prevents wheel skid and loss of control while taking off and accelerating.
ABS/ESP Control Module
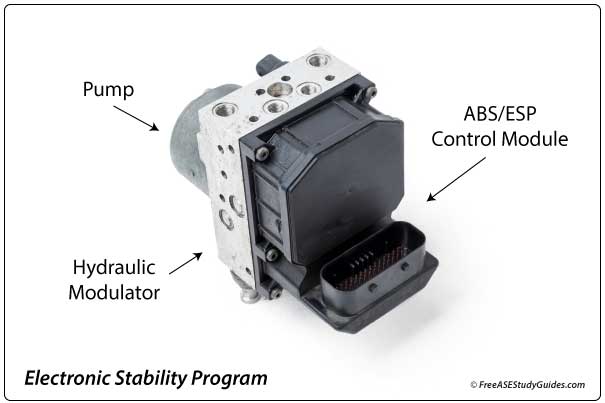
The ABS/ESP control module contains the algorithms and logic that control the system. With ESP, the ABS and TCS systems work together. For example, the ABS prevents wheel skid and a loss of control while braking, and the TCS prevents wheel skid and loss of control while taking off and accelerating.
The control module receives continuous input from the yaw, lateral acceleration, steering angle sensor, and a wheel speed sensor at each wheel. It uses this data to control the hydraulic valves in the hydraulic modulator to hold and release pressure on the brake calipers in an emergency.
The steering angle sensor informs the ESP/ABS module of the driver's intentions, and the yaw rate, lateral acceleration, and wheel speed sensors report the vehicle's actual speed and direction.
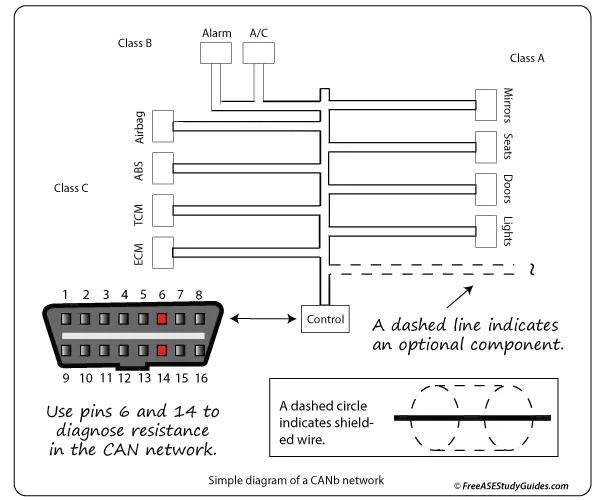
The ESP control module is on the CAN network, allowing it to communicate with the ECM, reduce throttle angle, and lower engine speed while controlling hydraulic pressure to the individual brake units.
ESP Sensors

The yaw rate sensor senses vehicle rotational speed around its vertical axis. It informs the system when a vehicle is about to fishtail or roll sideways. It compares this value to those in the module. When the car is over or understeering, it decelerates and controls individual brake units until it is stable.
The lateral acceleration sensor is also known as the G-sensor. It can sense the momentum and force pushing a car sideways in a sharp turn, G-force. The lateral acceleration and yaw rate sensors are often combined and placed in the vehicle's center (under the seat or center console).
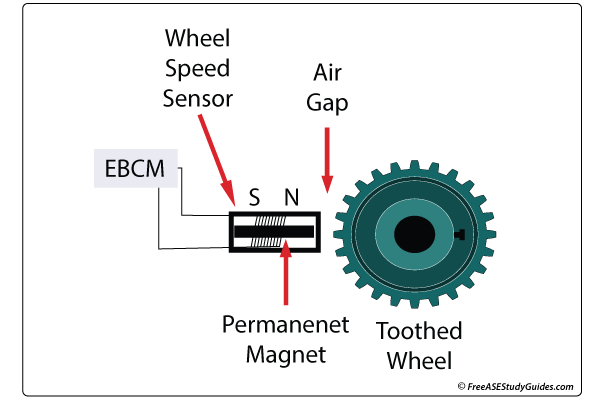
The four-wheel speed sensors report the rotational wheel speed of each wheel. If there were an impending skid, the ABS unit would sense this decrease in frequency and activate the appropriate solenoid, momentarily removing hydraulic pressure from the caliper. This pressure drop allows the wheel to spin instead of skidding.
Steering Wheel Angle Sensor

The SAS or steering angle sensor reports the turning speed and steering wheel angle to the control module. It informs the module of the driver's intentions. The steering wheel angle sensor contains a sensitive magnetic sensor to measure the steering angle.

The control module will set a fault code and illuminate the SRS/ABS/TCS light if it senses a problem with any of these sensors. The steering angle sensor, Code U0126, can cause issues like drift or pull and may need recalibration after a wheel alignment.
They sometimes require replacement when combined with the clock spring. Clock springs provide an electrical connection between the steering wheel and the steering column. The electrical connection to the wheel is lost if the steering wheel spins freely, stretches the clock springs ribbon beyond its limit, and breaks. The control module will set a fault code and illuminate the warning lamp. A new SAS sensor is fitted to the steering column only because the clock spring failed.