Classic CAN 2.0 and CAN FD
The controller area network, or CAN 2.0, is a message-based protocol that allows ECMs, controllers, and sensors to communicate on a high-speed bus. This network has saved on the miles of copper wiring used in earlier models. Today's high-performance vehicles use CAN FD (Flexible Data Rate). Classic CAN provides a 1 Mbps data rate and 11 and 29-bit frame lengths.
CAN FD can dynamically switch between message lengths and data rates. In addition, CAN FD is backward compatible with CAN 2.0; more manufacturers will use this protocol in newer models. Finally, it allows for 64-byte payloads and speeds of up to 8 Mbps, providing more information in a single frame.
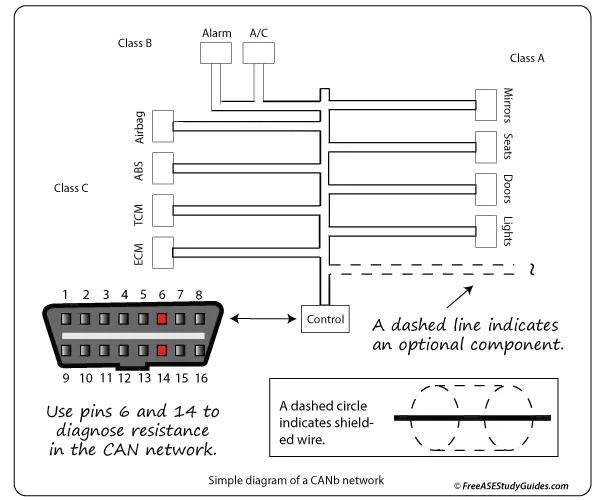
The controller area network is resistant to EMI. The protocol uses IDs to prioritize messages on the bus, preventing collisions on the network and allowing signals from critical modules like the ABS controller and ECM to have a higher priority than modules like the power seat module.